Mysql commands
-
Below when you see # it means from the unix shell. When you see mysql> it means from a MySQL prompt after logging into MySQL.
To login (from unix shell) use -h only if needed.
[mysql dir]/bin/mysql -h hostname -u root -pCreate a database on the sql server.
mysql> create database [databasename];List all databases on the sql server.
mysql> show databases;Switch to a database.
mysql> use [db name];To see all the tables in the db.
mysql> show tables;To see database’s field formats.
mysql> describe [table name];To delete a db.
mysql> drop database [database name];To delete a table.
mysql> drop table [table name];Show all data in a table.
mysql> SELECT * FROM [table name];Returns the columns and column information pertaining to the designated table.
mysql> show columns from [table name];Show certain selected rows with the value “whatever”.
mysql> SELECT * FROM [table name] WHERE [field name] = "whatever";Show all records containing the name “Bob” AND the phone number ‘3444444’.
mysql> SELECT * FROM [table name] WHERE name = “Bob” AND phone_number = ‘3444444’;
Show all records not containing the name “Bob” AND the phone number ‘3444444’ order by the phone_number field.
mysql> SELECT * FROM [table name] WHERE name != “Bob” AND phone_number = ‘3444444’ order by phone_number;
Show all records starting with the letters ‘bob’ AND the phone number ‘3444444’.
mysql> SELECT * FROM [table name] WHERE name like “Bob%” AND phone_number = ‘3444444’;
Show all records starting with the letters ‘bob’ AND the phone number ‘3444444’ limit to records 1 through 5.
mysql> SELECT * FROM [table name] WHERE name like “Bob%” AND phone_number = ‘3444444’ limit 1,5;
Use a regular expression to find records. Use “REGEXP BINARY” to force case-sensitivity. This finds any record beginning with a.
mysql> SELECT * FROM [table name] WHERE rec RLIKE “^a”;
Show unique records.
mysql> SELECT DISTINCT [column name] FROM [table name];
Show selected records sorted in an ascending (asc) or descending (desc).
mysql> SELECT [col1],[col2] FROM [table name] ORDER BY [col2] DESC;
Return number of rows.
mysql> SELECT COUNT(*) FROM [table name];
Sum column.
mysql> SELECT SUM(*) FROM [table name];
Join tables on common columns.
mysql> select lookup.illustrationid, lookup.personid,person.birthday from lookup left join person on lookup.personid=person.personid=statement to join birthday in person table with primary illustration id;
Creating a new user. Login as root. Switch to the MySQL db. Make the user. Update privs.
# mysql -u root -p
mysql> use mysql;
mysql> INSERT INTO user (Host,User,Password) VALUES(‘%’,‘username’,PASSWORD(‘password’));
mysql> flush privileges;Change a users password from unix shell.
# [mysql dir]/bin/mysqladmin -u username -h hostname.blah.org -p password ‘new-password’
Change a users password from MySQL prompt. Login as root. Set the password. Update privs.
# mysql -u root -p
mysql> SET PASSWORD FOR ‘user’@‘hostnaDISCLAIMER: All statements posted here are In my opinion ,not investment advice to buy or sell. Do your own DD me’ = PASSWORD(‘passwordhere’);
mysql> flush privileges;Recover a MySQL root password. Stop the MySQL server process. Start again with no grant tables.
Login to MySQL as root. Set new password. Exit MySQL and restart MySQL server.
# /etc/init.d/mysql stop
# mysqld_safe --skip-grant-tables &
# mysql -u root
mysql> use mysql;
mysql> update user set password=PASSWORD(“newrootpassword”) where User=‘root’;
mysql> flush privileges;
mysql> quit
# /etc/init.d/mysql stop
# /etc/init.d/mysql startSet a root password if there is on root password.
# mysqladmin -u root password newpassword
Update a root password.
# mysqladmin -u root -p oldpassword newpassword
Allow the user “bob” to connect to the server from localhost using the password “passwd”.
Login as root. Switch to the MySQL db. Give privs. Update privs.
# mysql -u root -p
mysql> use mysql;
mysql> grant usage on *.* to bob@localhost identified by ‘passwd’;
mysql> flush privileges;Give user privilages for a db. Login as root. Switch to the MySQL db. Grant privs. Update privs.
# mysql -u root -p
mysql> use mysql;
mysql> INSERT INTO db (Host,Db,User,Select_priv,Insert_priv,Update_priv,Delete_priv,Create_priv,Drop_priv) VALUES (‘%’,‘databasename’,‘username’,‘Y’,‘Y’,‘Y’,‘Y’,‘Y’,‘N’);
mysql> flush privileges;or
mysql> grant all privileges on databasename.* to username@localhost;
mysql> flush privileges;To update info already in a table.
mysql> UPDATE [table name] SET Select_priv = ‘Y’,Insert_priv = ‘Y’,Update_priv = ‘Y’ where [field name] = ‘user’;
Delete a row(s) from a table.
mysql> DELETE from [table name] where [field name] = ‘whatever’;
Update database permissions/privilages.
mysql> flush privileges;
Delete a column.
mysql> alter table [table name] drop column [column name];
Add a new column to db.
mysql> alter table [table name] add column [new column name] varchar (20);
Change column name.
mysql> alter table [table name] change [old column name] [new column name] varchar (50);
Make a unique column so you get no dupes.
mysql> alter table [table name] add unique ([column name]);
Make a column bigger.
mysql> alter table [table name] modify [column name] VARCHAR(3);
Delete unique from table.
mysql> alter table [table name] drop index [colmn name];
Load a CSV file into a table.
mysql> LOAD DATA INFILE ‘/tmp/filename.csv’ replace INTO TABLE [table name] FIELDS TERMINATED BY ‘,’ LINES TERMINATED BY ‘\n’ (field1,field2,field3);
Dump all databases for backup. Backup file is sql commands to recreate all db’s.
# [mysql dir]/bin/mysqldump -u root -ppassword --opt >/tmp/alldatabases.sql
Dump one database for backup.
# [mysql dir]/bin/mysqldump -u username -ppassword --databases databasename >/tmp/databasename.sql
Dump a table from a database.
# [mysql dir]/bin/mysqldump -c -u username -ppassword databasename tablename > /tmp/databasename.tablename.sql
Restore database (or database table) from backup.
# [mysql dir]/bin/mysql -u username -ppassword databasename < /tmp/databasename.sql
Create Table Example 1.
mysql> CREATE TABLE [table name] (firstname VARCHAR(20), middleinitial VARCHAR(3), lastname VARCHAR(35),suffix VARCHAR(3),officeid VARCHAR(10),userid VARCHAR(15),username VARCHAR(8),email VARCHAR(35),phone VARCHAR(25), groups VARCHAR(15),datestamp DATE,timestamp time,pgpemail VARCHAR(255));
Create Table Example 2.
mysql> create table [table name] (personid int(50) not null auto_increment primary key,firstname varchar(35),middlename varchar(50),lastnamevarchar(50) default ‘bato’);
MYSQL Statements and clauses
ALTER DATABASE ALTER TABLE ALTER VIEW ANALYZE TABLE BACKUP TABLE CACHE INDEX CHANGE MASTER TO CHECK TABLE CHECKSUM TABLE COMMIT CREATE DATABASE CREATE INDEX CREATE TABLE CREATE VIEW DELETE DESCRIBE DO DROP DATABASE DROP INDEX DROP TABLE DROP USER DROP VIEW EXPLAIN FLUSH GRANT HANDLER INSERT JOIN KILL LOAD DATA FROM MASTER LOAD DATA INFILE LOAD INDEX INTO CACHE LOAD TABLE...FROM MASTER LOCK TABLES OPTIMIZE TABLE PURGE MASTER LOGS RENAME TABLE REPAIR TABLE REPLACE RESET RESET MASTER RESET SLAVE RESTORE TABLE REVOKE ROLLBACK ROLLBACK TO SAVEPOINT SAVEPOINT SELECT SET SET PASSWORD SET SQL_LOG_BIN SET TRANSACTION SHOW BINLOG EVENTS SHOW CHARACTER SET SHOW COLLATION SHOW COLUMNS SHOW CREATE DATABASE SHOW CREATE TABLE SHOW CREATE VIEW SHOW DATABASES SHOW ENGINES SHOW ERRORS SHOW GRANTS SHOW INDEX SHOW INNODB STATUS SHOW LOGS SHOW MASTER LOGS SHOW MASTER STATUS SHOW PRIVILEGES SHOW PROCESSLIST SHOW SLAVE HOSTS SHOW SLAVE STATUS SHOW STATUS SHOW TABLE STATUS SHOW TABLES SHOW VARIABLES SHOW WARNINGS START SLAVE START TRANSACTION STOP SLAVE TRUNCATE TABLE UNION UNLOCK TABLES USEString Functions
AES_DECRYPT AES_ENCRYPT ASCII BIN BINARY BIT_LENGTH CHAR CHAR_LENGTH CHARACTER_LENGTH COMPRESS CONCAT CONCAT_WS CONV DECODE DES_DECRYPT DES_ENCRYPT ELT ENCODE ENCRYPT EXPORT_SET FIELD FIND_IN_SET HEX INET_ATON INET_NTOA INSERT INSTR LCASE LEFT LENGTH LOAD_FILE LOCATE LOWER LPAD LTRIM MAKE_SET MATCH AGAINST MD5 MID OCT OCTET_LENGTH OLD_PASSWORD ORD PASSWORD POSITION QUOTE REPEAT REPLACE REVERSE RIGHT RPAD RTRIM SHA SHA1 SOUNDEX SPACE STRCMP SUBSTRING SUBSTRING_INDEX TRIM UCASE UNCOMPRESS UNCOMPRESSED_LENGTH UNHEX UPPERDate and Time Functions
ADDDATE ADDTIME CONVERT_TZ CURDATE CURRENT_DATE CURRENT_TIME CURRENT_TIMESTAMP CURTIME DATE DATE_ADD DATE_FORMAT DATE_SUB DATEDIFF DAY DAYNAME DAYOFMONTH DAYOFWEEK DAYOFYEAR EXTRACT FROM_DAYS FROM_UNIXTIME GET_FORMAT HOUR LAST_DAY LOCALTIME LOCALTIMESTAMP MAKEDATE MAKETIME MICROSECOND MINUTE MONTH MONTHNAME NOW PERIOD_ADD PERIOD_DIFF QUARTER SEC_TO_TIME SECOND STR_TO_DATE SUBDATE SUBTIME SYSDATE TIME TIMEDIFF TIMESTAMP TIMESTAMPDIFF TIMESTAMPADD TIME_FORMAT TIME_TO_SEC TO_DAYS UNIX_TIMESTAMP UTC_DATE UTC_TIME UTC_TIMESTAMP WEEK WEEKDAY WEEKOFYEAR YEAR YEARWEEKMathematical and Aggregate Functions
ABS ACOS ASIN ATAN ATAN2 AVG BIT_AND BIT_OR BIT_XOR CEIL CEILING COS COT COUNT CRC32 DEGREES EXP FLOOR FORMAT GREATEST GROUP_CONCAT LEAST LN LOG LOG2 LOG10 MAX MIN MOD PI POW POWER RADIANS RAND ROUND SIGN SIN SQRT STD STDDEV SUM TAN TRUNCATE VARIANCEFlow Control Functions
CASE IF IFNULL NULLIFCommand-Line Utilities
comp_err isamchk make_binary_distribution msql2mysql my_print_defaults myisamchk myisamlog myisampack mysqlaccess mysqladmin mysqlbinlog mysqlbug mysqlcheck mysqldump mysqldumpslow mysqlhotcopy mysqlimport mysqlshow perrorPerl API - using functions and methods built into the Perl DBI with MySQL
available_drivers begin_work bind_col bind_columns bind_param bind_param_array bind_param_inout can clone column_info commit connect connect_cached data_sources disconnect do dump_results err errstr execute execute_array execute_for_fetch fetch fetchall_arrayref fetchall_hashref fetchrow_array fetchrow_arrayref fetchrow_hashref finish foreign_key_info func get_info installed_versions last_insert_id looks_like_number neat neat_list parse_dsn parse_trace_flag parse_trace_flags ping prepare prepare_cached primary_key primary_key_info quote quote_identifier rollback rows selectall_arrayref selectall_hashref selectcol_arrayref selectrow_array selectrow_arrayref selectrow_hashref set_err state table_info table_info_all tables trace trace_msg type_info type_info_all Attributes for HandlesPHP API - using functions built into PHP with MySQL
mysql_affected_rows mysql_change_user mysql_client_encoding mysql_close mysql_connect mysql_create_db mysql_data_seek mysql_db_name mysql_db_query mysql_drop_db mysql_errno mysql_error mysql_escape_string mysql_fetch_array mysql_fetch_assoc mysql_fetch_field mysql_fetch_lengths mysql_fetch_object mysql_fetch_row mysql_field_flags mysql_field_len mysql_field_name mysql_field_seek mysql_field_table mysql_field_type mysql_free_result mysql_get_client_info mysql_get_host_info mysql_get_proto_info mysql_get_server_info mysql_info mysql_insert_id mysql_list_dbs mysql_list_fields mysql_list_processes mysql_list_tables mysql_num_fields mysql_num_rows mysql_pconnect mysql_ping mysql_query mysql_real_escape_string mysql_result mysql_select_db mysql_stat mysql_tablename mysql_thread_id mysql_unbuffered_query -
 R rick moved this topic from File assistance | Discussion on
R rick moved this topic from File assistance | Discussion on
-

Create a shell script that will dump the Redis database
cd ~ mkdir redi-backups-script cd redis-backups-script nano redis_backups-script.shPaste the script below:
#!/bin/bash rdb_file="/Place-directory-of-rdb-here/redis/dump.rdb" redis_cli="/usr/bin/redis-cli" DIR=`date +%d-%m-%y` DEST=~/redis_backups/$DIR mkdir $DEST echo save| $redis_cli exit 1Set script to executable:
chmod +x ~/scripts/redis_backups-script.shCreate a cron to run daily:
Then create a cron job to run the script every day at midnight:
crontab -e 0 0 * * * ~/redis-backups-script/redis_backup.shRestore RDB backup
Disable Append Only in the config:
nano /etc/redis/redis.conf appendonly noStop redis:
sudo service redis-server stopRestore the redis backup:
rename the rdb file you wish sudo cp /home/redis/dump.rdb /home/redis/dump.rdb.bak
You can then copy the backup rdb file as follows:
sudo cp /redis_backups/------/dump.rdb /home/redis/dump.rdbApply the proper permissions to the dump.rdb file:
sudo chmod 660 /home/redis/dump.rdbRe-starting Redis server
sudo service redis-server start
-
Install Zabbix 7.2 repo
wget https://repo.zabbix.com/zabbix/7.2/release/debian/pool/main/z/zabbix-release/zabbix-release_latest_7.2+debian12_all.deb
dpkg -i zabbix-release_latest_7.2+debian12_all.deb

Update repos
apt update
Install Zabbix server and frontend
apt install zabbix-server-mysql zabbix-frontend-php zabbix-nginx-conf zabbix-sql-scripts zabbix-agent2
Install plugins
apt install zabbix-agent2-plugin-mongodb zabbix-agent2-plugin-mssql zabbix-agent2-plugin-postgresql
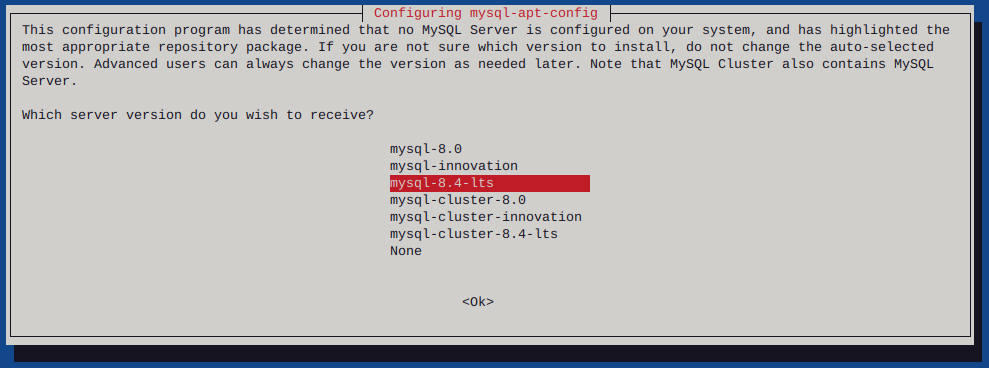
Install mysql
wget https://dev.mysql.com/get/mysql-apt-config_0.8.30-1_all.deb
sudo dpkg -i mysql-apt-config_0.8.30-1_all.deb
Error on this new install, where lsb-release is not installed
apt-get install lsb-release
Try again…
dpkg -i mysql-apt-config_0.8.30-1_all.debError, gnupg not installed
apt install gnupg2
Give it another go…
dpkg -i mysql-apt-config_0.8.30-1_all.deb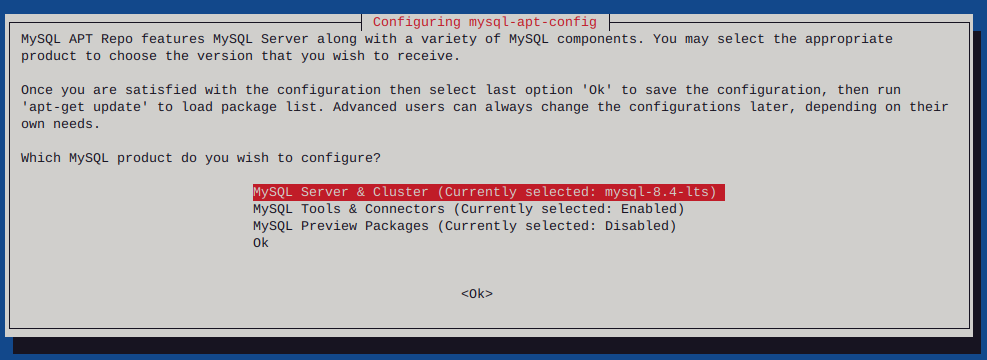
I had to list upgradable packages :
apt-list --upgradableWhich spit out : mysql-common/unknown 8.4.4-1debian12 all [upgradable from: 5.8+1.1.0]
Then installed mysql-common
apt-get install mysql-common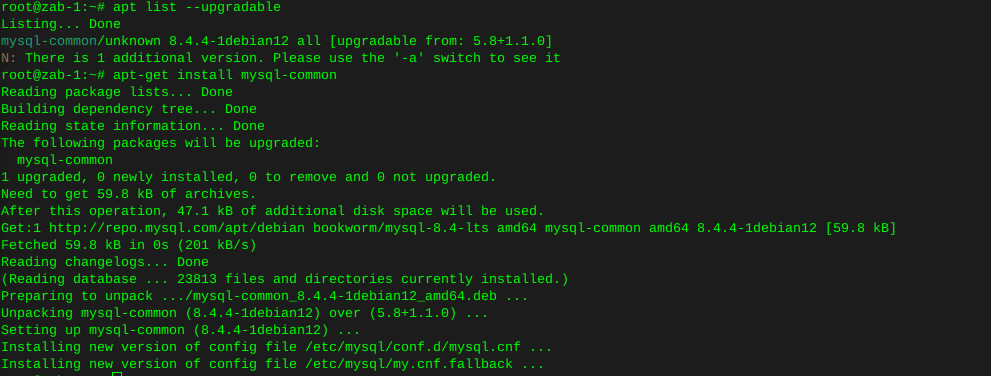
Had to uninstall Mariadb to resolve these conflicts
apt remove mariadb-client-coreThen install mysql-server:
apt install mysql-server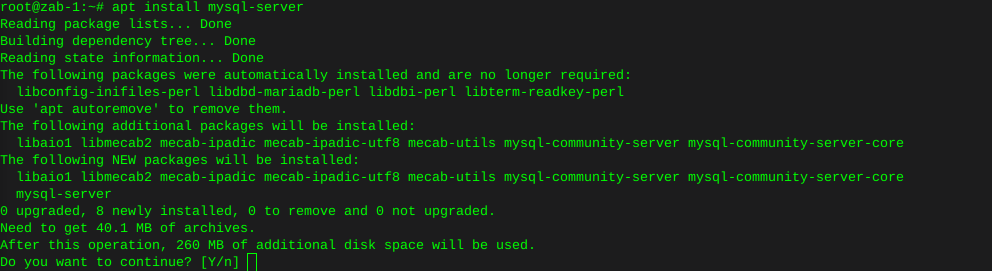
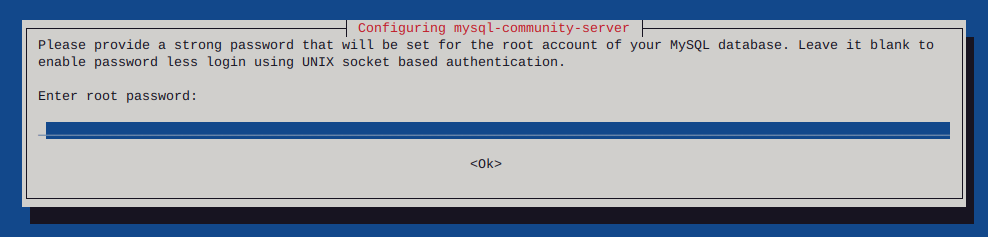
Enter your password, twice
Now enter mysql by typing :
mysql -u root -p
Enter the following command individually Where ‘password’ is where you type in your actual own password
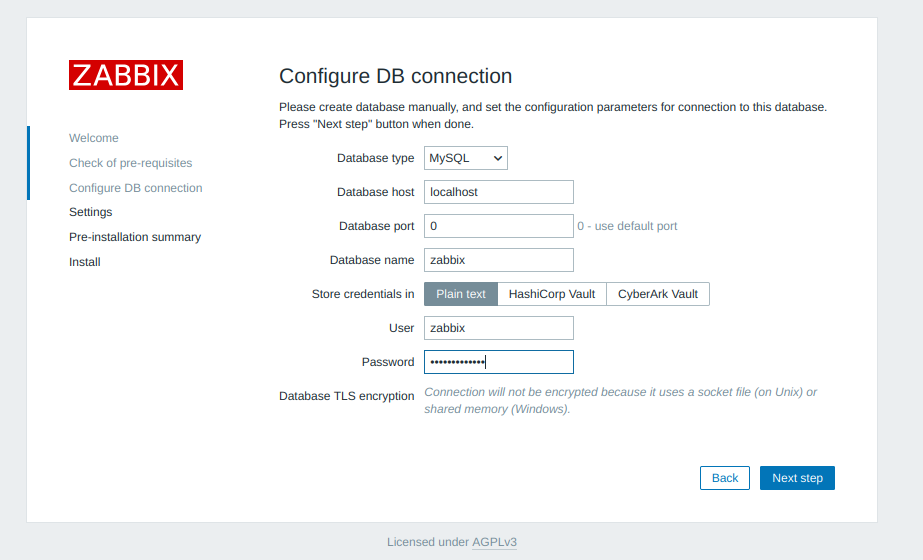
mysql> create database zabbix character set utf8mb4 collate utf8mb4_bin; mysql> create user zabbix@localhost identified by 'password'; mysql> grant all privileges on zabbix.* to zabbix@localhost; mysql> set global log_bin_trust_function_creators = 1; mysql> quit;Populate the database with zabbix script
zcat /usr/share/zabbix/sql-scripts/mysql/server.sql.gz | mysql --default-character-set=utf8mb4 -uzabbix -p zabbix mysql --u root -p set global log_bin_trust_function_creators = 0; quit;Edit file /etc/zabbix/zabbix_server.conf You can use nano
nano /etc/zabbix/zabbix_server.confUncomment the DBPassword section, and type your password
Then hold ctrl and tap x, it will ask if you want to save changes.
Enable services:
systemctl enable zabbix-server zabbix-agent2 nginx php8.2-fpm systemctl restart zabbix-server zabbix-agent2 nginx php8.2-fpmCheck that zabbix service has started
journalctl -xeu zabbix-server.service
Delete the 'default site in nginx
sudo rm -rf /etc/nginx/sites-enabled/defaultMake sure the symbolic link to the zabbix nginx file is present
ln -s /etc/zabbix/nginx.conf /etc/nginx/sites-enabled/zabbix.confCheck that the zabbix nginx file is in the includes in nginx config
nano /etc/nginx/nginx.confLook for :
include /etc/nginx/sites-enabled/*Now restart nginx
systemctl restart nginxHit the browser and type in the IP (or URL that you may have put in the zabbix nginx config file)

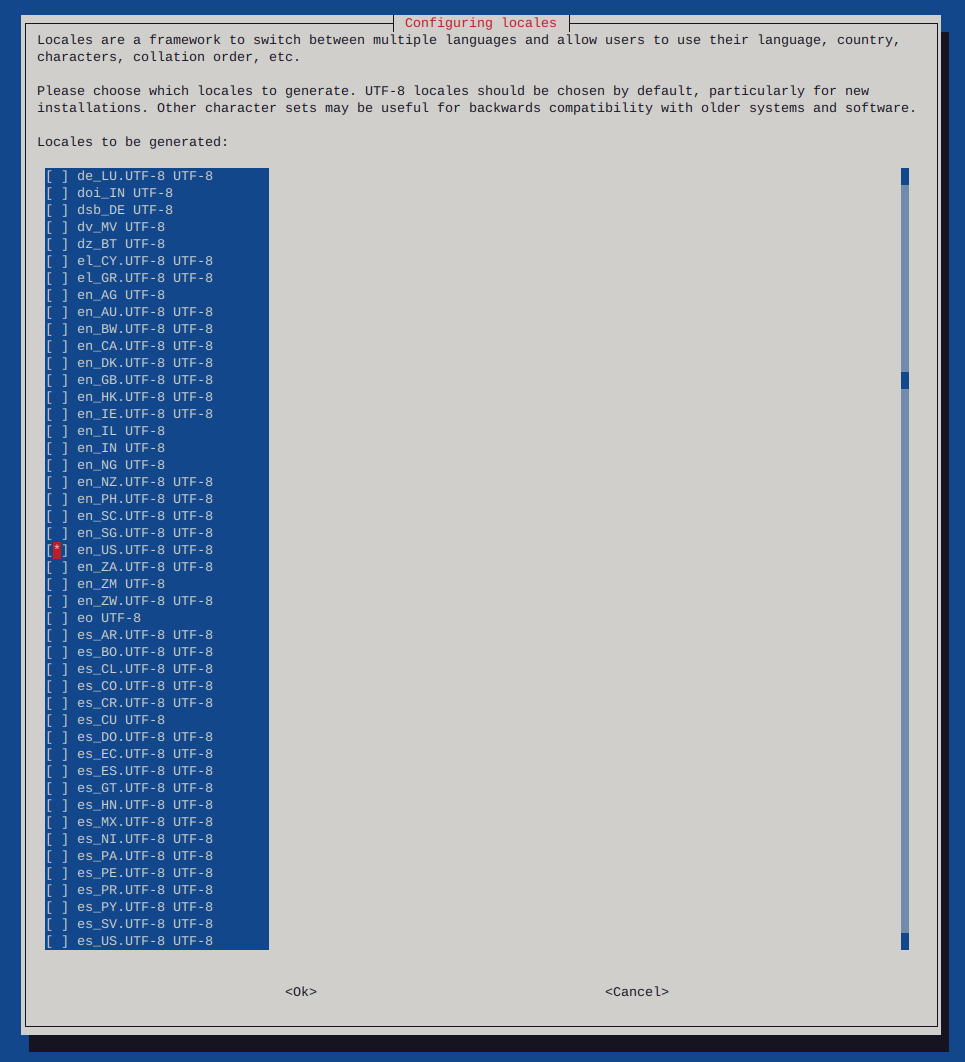
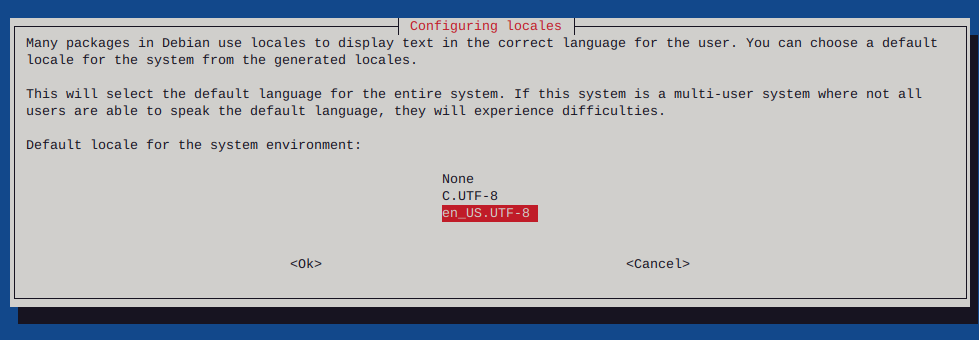
Make sure to configure locales
sudo dpkg-reconfigure locales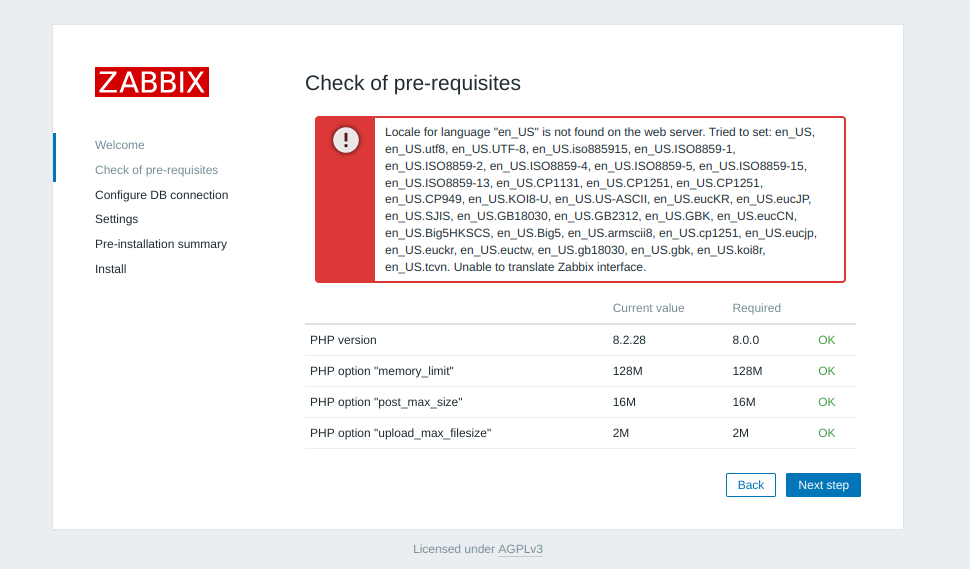

Reboot the system
sudo shutdown -r now
Add your database password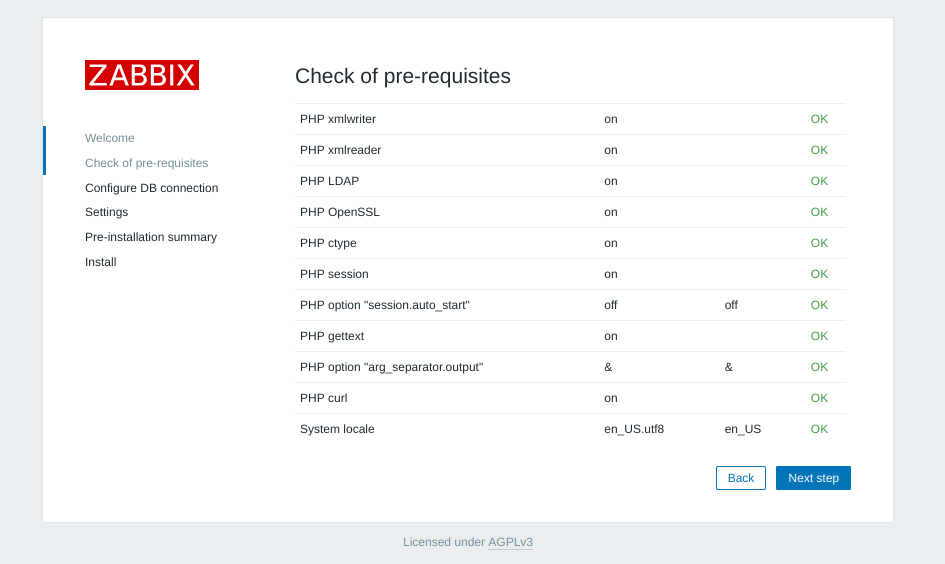
Add a server name
The default username is Admin, and the password is zabbix
-
Unable to negotiate with 10.10.1.35 port 22: no matching host key type found. Their offer: ssh-rsa,ssh-dss
While attempting ssh this error is generally due to mismatched versions of ssh, where an up to date version is attempting to access an older version
Add the following to your command :
The proper way:
ssh -o KexAlgorithms=diffie-hellman-group14-sha1 -oHostKeyAlgorithms=+ssh-dss 10.10.1.35The cheap way:
Example :
ssh -oHostKeyAlgorithms=+ssh-dss 10.10.1.35or ssh -oHostKeyAlgorithms=+ssh-dss user@10.10.1.35
This can be added to the ~/.ssh/config file
Host my-server HostName 10.10.1.35 HostKeyAlgorithms=+ssh-dss
-
Locate hard drive and get information
ls -l /sys/block | grep sd.Output:
lrwxrwxrwx 1 root root 0 Jun 22 06:28 sda -> ../devices/pci0000:00/0000:00:1f.2/ata1/host0/target0:0:0/0:0:0:0/block/sda lrwxrwxrwx 1 root root 0 Jun 22 06:28 sdb -> ../devices/pci0000:00/0000:00:1f.2/ata2/host1/target1:0:0/1:0:0:0/block/sdb lrwxrwxrwx 1 root root 0 Jun 22 06:28 sdc -> ../devices/pci0000:00/0000:00:1f.2/ata3/host2/target2:0:0/2:0:0:0/block/sdc lrwxrwxrwx 1 root root 0 Jun 22 06:28 sdd -> ../devices/pci0000:00/0000:00:1f.2/ata4/host3/target3:0:0/3:0:0:0/block/sddOr for a more detailed view
strace -e trace=open lsblk NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINTS sda 8:0 0 3.6T 0 disk ├─data--2-data--2_tmeta 252:3 0 15.9G 0 lvm │ └─data--2-data--2-tpool 252:9 0 3.6T 0 lvm │ ├─data--2-data--2 252:10 0 3.6T 1 lvm │ ├─data--2-vm--101--disk--0 252:11 0 8G 0 lvm │ ├─data--2-vm--103--disk--0 252:12 0 32G 0 lvm │ ├─data--2-vm--107--disk--0 252:13 0 500G 0 lvm │ └─data--2-vm--108--disk--0 252:20 0 100G 0 lvm └─data--2-data--2_tdata 252:6 0 3.6T 0 lvm └─data--2-data--2-tpool 252:9 0 3.6T 0 lvm ├─data--2-data--2 252:10 0 3.6T 1 lvm ├─data--2-vm--101--disk--0 252:11 0 8G 0 lvm ├─data--2-vm--103--disk--0 252:12 0 32G 0 lvm ├─data--2-vm--107--disk--0 252:13 0 500G 0 lvm └─data--2-vm--108--disk--0 252:20 0 100G 0 lvm sdb 8:16 0 698.6G 0 disk └─sdb1 8:17 0 698.6G 0 part /mnt/pve/backups sdc 8:32 0 3.6T 0 disk ├─vm--data-vm--data_tmeta 252:4 0 15.9G 0 lvm │ └─vm--data-vm--data-tpool 252:14 0 3.6T 0 lvm │ ├─vm--data-vm--data 252:15 0 3.6T 1 lvm │ ├─vm--data-vm--100--disk--0 252:16 0 270G 0 lvm │ ├─vm--data-vm--102--disk--0 252:17 0 100G 0 lvm │ ├─vm--data-vm--104--disk--0 252:18 0 25G 0 lvm │ └─vm--data-vm--106--disk--0 252:19 0 32G 0 lvm └─vm--data-vm--data_tdata 252:7 0 3.6T 0 lvm └─vm--data-vm--data-tpool 252:14 0 3.6T 0 lvm ├─vm--data-vm--data 252:15 0 3.6T 1 lvm ├─vm--data-vm--100--disk--0 252:16 0 270G 0 lvm ├─vm--data-vm--102--disk--0 252:17 0 100G 0 lvm ├─vm--data-vm--104--disk--0 252:18 0 25G 0 lvm └─vm--data-vm--106--disk--0 252:19 0 32G 0 lvm sdd 8:48 0 931.5G 0 disk ├─sdd1 8:49 0 1007K 0 part ├─sdd2 8:50 0 1G 0 part └─sdd3 8:51 0 930.5G 0 part ├─pve-swap 252:0 0 8G 0 lvm [SWAP] ├─pve-root 252:1 0 96G 0 lvm / ├─pve-data_tmeta 252:2 0 8.1G 0 lvm │ └─pve-data 252:8 0 794.3G 0 lvm └─pve-data_tdata 252:5 0 794.3G 0 lvm └─pve-data 252:8 0 794.3G 0 lvm +++ exited with 0 +++ cat /proc/partitions major minor #blocks name 8 0 3907018584 sda 8 16 732574584 sdb 8 17 732572672 sdb1 8 32 3907018584 sdc 8 48 976762584 sdd 8 49 1007 sdd1 8 50 1048576 sdd2 8 51 975712967 sdd3 252 0 8388608 dm-0 252 1 100663296 dm-1 252 2 8495104 dm-2 252 3 16650240 dm-3 252 4 16650240 dm-4 252 6 3873329152 dm-6 252 5 832888832 dm-5 252 7 3873329152 dm-7 252 8 832888832 dm-8 252 9 3873329152 dm-9 252 10 3873329152 dm-10 252 11 8388608 dm-11 252 12 33554432 dm-12 252 13 524288000 dm-13 252 14 3873329152 dm-14 252 15 3873329152 dm-15 252 16 283115520 dm-16 252 17 104857600 dm-17 252 18 26214400 dm-18 252 19 33554432 dm-19 252 20 104857600 dm-20Locate drive by serial and model information
hdparm -i /dev/sda /dev/sda: Model=WDC WD4000FYYZ-05UL1B0, FwRev=00.0NS05, SerialNo=WD-WCC132262513 Config={ HardSect NotMFM HdSw>15uSec SpinMotCtl Fixed DTR>5Mbs FmtGapReq } RawCHS=16383/16/63, TrkSize=0, SectSize=0, ECCbytes=0 BuffType=unknown, BuffSize=unknown, MaxMultSect=16, MultSect=off CurCHS=16383/16/63, CurSects=16514064, LBA=yes, LBAsects=7814037168 IORDY=on/off, tPIO={min:120,w/IORDY:120}, tDMA={min:120,rec:120} PIO modes: pio0 pio3 pio4 DMA modes: mdma0 mdma1 mdma2 UDMA modes: udma0 udma1 udma2 udma3 udma4 udma5 *udma6 AdvancedPM=yes: unknown setting WriteCache=disabled Drive conforms to: Unspecified: ATA/ATAPI-1,2,3,4,5,6,7 * signifies the current active mode
-
Screen recording can use webm as their format, it can be more simple to use a gif to embed into a website or forum, than adding scripts to host different video format.
In this case I grabbed a screen record of the progress for writing zeros to a hard drive with dd
Use ffmpeg to convert webm to gif:
First create a pallet:
Move into the directory which the webm is located, or type in the path
Where ‘dd.webm’ is the screen recording
ffmpeg -y -i dd.webm -vf palettegen palette.pngOutput:
Then convert the webm to gif:
ffmpeg -y -i dd.webm -i palette.png -filter_complex paletteuse -r 10 dd.gif
This is what I ended up with, looks like any image of any alien on the interwebz, as if shot through a potato, some tweaking of the command is in my future. None the less.
